 2 years ago
220
2 years ago
220
The rise of humanoid robots didn’t happen overnight, but a kind of perfect storm has accelerated the phenomenon over the past year and change. The foundation, of course, is decades of research.
Toiling away in research facilities and R&D departments laid the ground work for a new generation of technology. The necessary software and components have come a long way, driven by innovations in industrial robotics, autonomous driving and even the smartphone industry.
And then a global pandemic happened. The events of the last few years have been important for two deeply interconnected reasons. First, investment in robotics has skyrocketed. Second, staffing continues to be an issue. You could say that these conditions have created a humanoid-shaped hole that a robot could walk right through.
Last April (4-20, get it?), Tesla announced plans to build a robot. Musk’s plans were predictably grandiose and overly optimistic. When the company’s robotics division finally showed off a robot that October, it inevitably failed to match the picture he painted. One thing we can say, however, is that the experience seemed to have shaken something loose. Suddenly a lot of startups came out of the woodwork.
The ultimate efficacy of a humanoid robot is still very much an open question — but it’s one a lot of founders and backers believe in. To date there’s 1X, Figure, Sanctuary AI and — arguably — Agility.
There’s also Apptronik — though the Austin-based firm is hardly a newcomer to the scene. The team’s work dates back to 2017, when it was contracted to build a robot for NASA that would become Valkyrie. Work on the robot that was set to become Valkyrie II gave way to a commercial product that would eventually become Apollo.
Co-founder and CEO Jeff Cardenas gave me a preview of the system earlier this year, during an informal meeting at Automate. He wouldn’t allow me to share images at the time, so I had to offer up a description:
I might even go so far as describing it as a cartoony aesthetic, with a head shaped like an old-school iMac, and a combination of button eyes and display that comprise the face. While it’s true that most people won’t interact with these systems, which are designed to operate in places like warehouses and factory floors, it’s not necessary to embrace ominousness for the sake of looking cool.
That last bit was a bit of a dig at what I’ve begun to refer to as the “convergent evolution” of humanoid robot design. Granted, the statement is based on what has thus far only been renders, but many of the companies operating in the space have opted instead for a kind of dark minimalism. It’s something that wouldn’t feel entirely out of place is a dystopian sci-fi film, which I don’t believe is the vibe they’re going for here. Apptronik’s new robot shares common, more aesthetic, DNA with Astra — a teleoperated torso-up robot — than it does Valkyrie.

Apptronik’s Astra Robot. Image Credits: Apptronik
This morning, the company is finally sharing Apollo with the world. The company has released a series of videos featuring the robot performing a variety of different tasks, including walking, unloading trailers, palletizing and case picking.
“It took a lot of discipline for us when we saw a lot of the announcements and how fast people are getting things walking,” Cardenas says. “We’ve had walking robots for seven years. We’ve built robots in three months. We had a system that from blank sheet of paper to getting it walking took four months. We’ve been iterating over the years and had our heads down, trying to solve the technology problems that are needed to get this stuff out there.”
Still, even with that experience under its belt, these first videos are still baby steps. While other robotics makers are currently talking up their “general purpose” system, Apptronik acknowledges the correct approach is proving that you can do a small handful of things well.
“This is an interesting thing from the interview that you said that really clicked with me,” Cardenas tells me of our last conversation. “You said everyone is jumping toward ‘general purpose’ and you don’t understand why people don’t look to ‘multi-purpose.’ It clicked with me, because what I have been communicating as general purpose, really the initial users are multi-purpose. With this roll out, first you need to show if the robot has purpose. Can it do something useful and viable in the real world. From there, you want to show that it can be multi-purpose and do a handful of tasks.”

He describes an approach of moving from one task to three to four, and from there, “400.” Even getting to three or four will take an abundance of testing, first in Apptronik’s makeshift warehouse facility in Austin and then with select partners. These things need to be battle tested to an absurd degree and then battle tested some more. Having a system fail on the job isn’t in anyone’s best interest.
The company is taking a platform-style approach to developing further applications, akin to what Boston Dynamics has offered with Spot. “Apollo is the ‘iPhone’ of robots,” the company writes, “enabling development partners to expand on Apptronik developed solutions and extend the digital world into the physical world to work alongside people and do the jobs that they don’t want to do.”
Trailer unloading, palletizing and case picking are a solid trio to start with — they are in demand, and each has its own unique form of wear and tear on human bodies. I’ve heard plenty of horror stories about trailers in particular. Not only is a repetitive task requiring one to lift heavy payloads hard on the body, the conditions inside the trailer are especially brutal. Keep in mind, a good portion of the trailer is exposed to the elements, often times making it unbearably hot or cold inside. Warehouse managers will tell you plenty of first-hand accounts of workers starting and quitting on the same day.
One benefit the humanoid form factor presents over others is the ability to deploy systems in a fully brownfield environment. That is to say that — instead of rebuilding from the ground up — the system can get up and running with minimal adjustments to a warehouse built for human workers. Cardenas says the system will also be able to work alongside other robots. Presumably many of the companies interested in such technologies already have some automation up and running. In one scenario, Apollo is seen loading boxes onto an AMR (autonomous mobile robot) similar in form factor to a Kiva robot, which takes the totes the rest of the way.
Interestingly, Apollo also offers modular functionality. That means that the torso could effectively be detached from the legs and mounted onto a wheeled base.
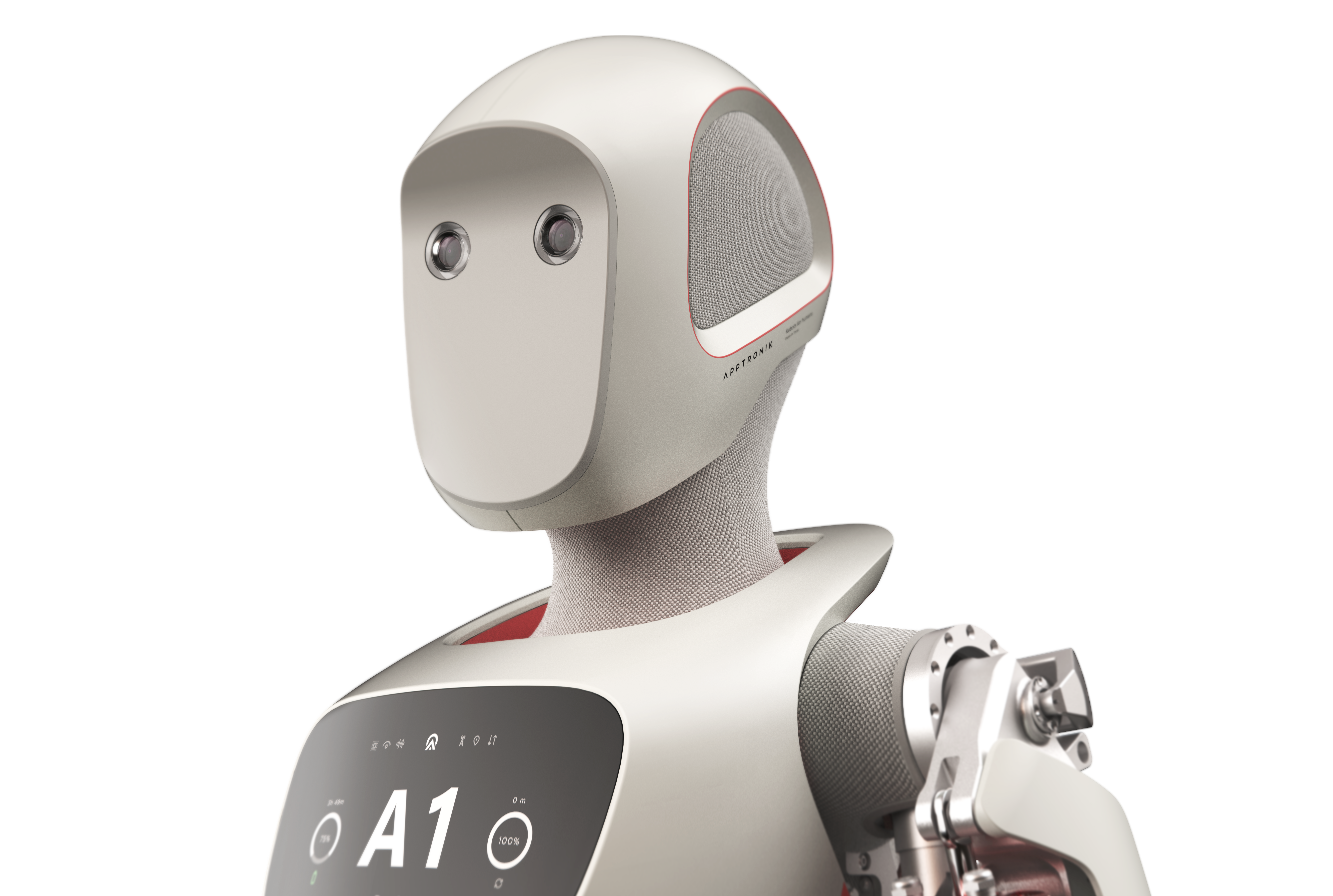
Image Credits: Apptronik
“Ultimately, we felt that legs would win the day,” Cardenas says. “It’s a tough problem. You have to deal with falling over, and other things. But try to get around in a wheelchair. It’s difficult. There are places you can’t get around. Also, just look at where AMRs can go today in these existing facilities, and there’s challenges for wheels. But whatever makes the most sense. Certainly there’s going to be different kinds of robots, and there are places where legs make sense and places where wheels make sense.”
The videos Apptronik showed me presented two distinct variations on walking. The first is similar to other bipedal systems we’ve seen. The knees are bent at an angle and the motion looks far more unnatural than what we’re accustomed to seeing. The second shows the robot taking a far more human-like stroll.
“We can control the pitch of the knee,” says Cardenas. “Everyone says, ‘oh, the robot doesn’t look very comfortable there. We really focused on natural gait. With our new controllers, we can do close to straight leg walking, which is something that has eluded robotics for a while.”
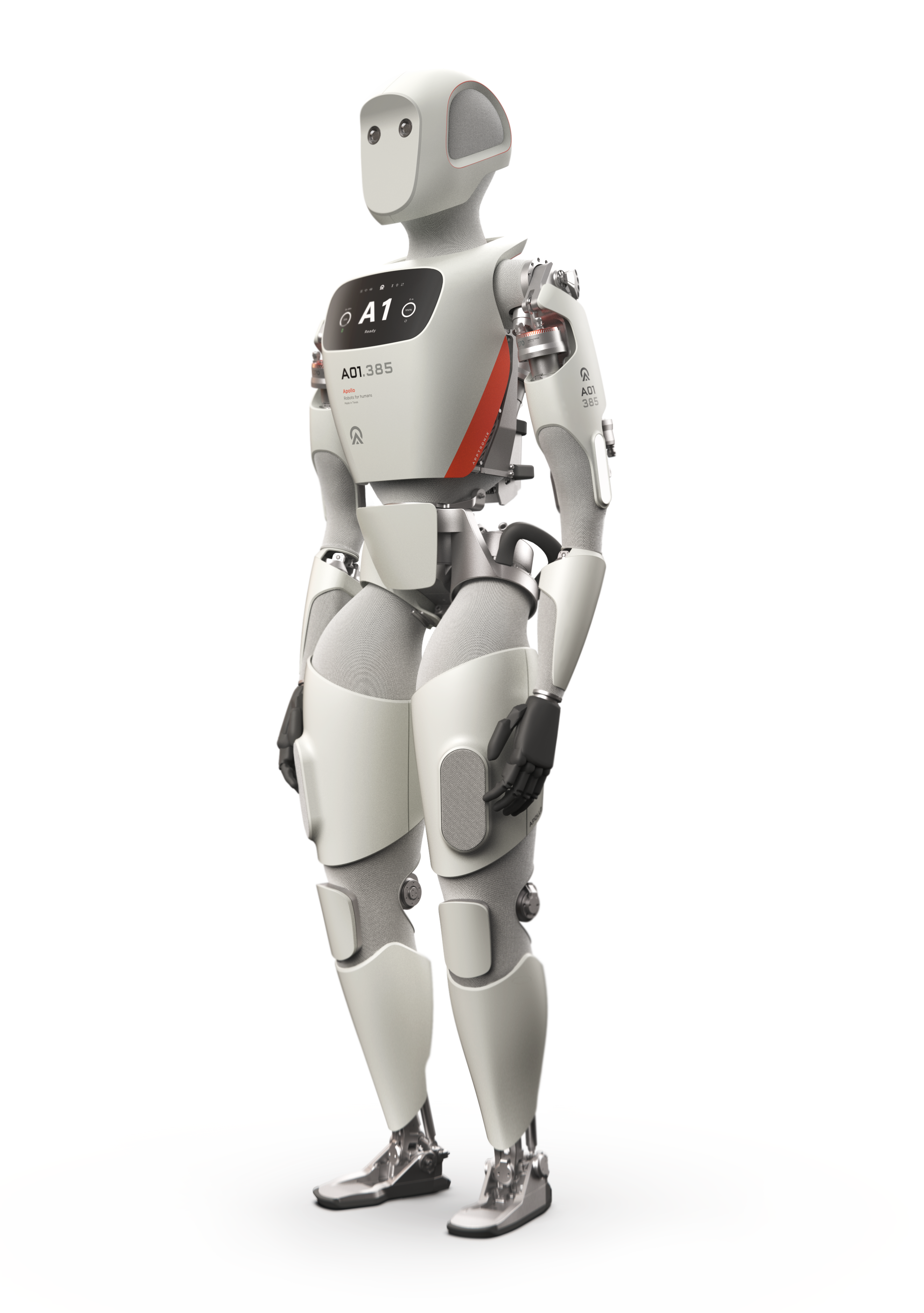
Apollo stands five foot, eight inches tall and weighs 160 pounds. It is capable of lifting boxes weighing up to 55 pounds. The circular eyes are a pair of stereoscopic cameras. Below this, a monochromatic E Ink display provides a simple but expressive mouth. The chest, meanwhile, features an OLED display that presents information designed to be read by human co-workers.
“The chest screen is display only,” explains Cardenas. “You’re not going to poke and be touching the robot. You want the robot to be able to give you certain information that you might need that makes sense in the context.”
Human-like manipulators are an important next step. “We’re very closely exploring dexterous hands. They’re a big part of the equation. The fully realized humanoid has hands. Whether they’re five-fingered hands or three-fingered hands, there’s debate. But we’ve not done a lot of work in that space, but besides [teleoperation], in our view, it isn’t ready for the initial use cases and not needed. We’re building up toward that in R&D. You’ll see increasing dexterity over time.”
In spite of keeping much of its work behind the curtain thus far, Apptronik has already managed to drum up genuine interest for Apollo. “We’ve signed a handful of pilots already,” adds Cardenas. “We have a customer center where we’re doing on-site pilots this year, and then starting field pilots next year. Those will likely start in Q2. What we’re showing off now is our alpha hardware unit. We’ve already started design on beta, which is the fieldable units. That’s what we’ll use for pilots next year. Pilots next year, commercial launch at the end of next year. 2025, we hope to be in commercial availability.”
The company is also in the process of raising an A round. “We’re not disclosing how much that is,” the CEO says. “We’re healthy and one of the advantages we’ve had is a lot of revenue. We built the whole company on revenue, so we’ve only just raised money in the last couple of years. We currently have 84 full-time employees and we will be growing over the coming year. We expect pretty significant growth, mostly in engineering.”







 English (US) ·
English (US) ·