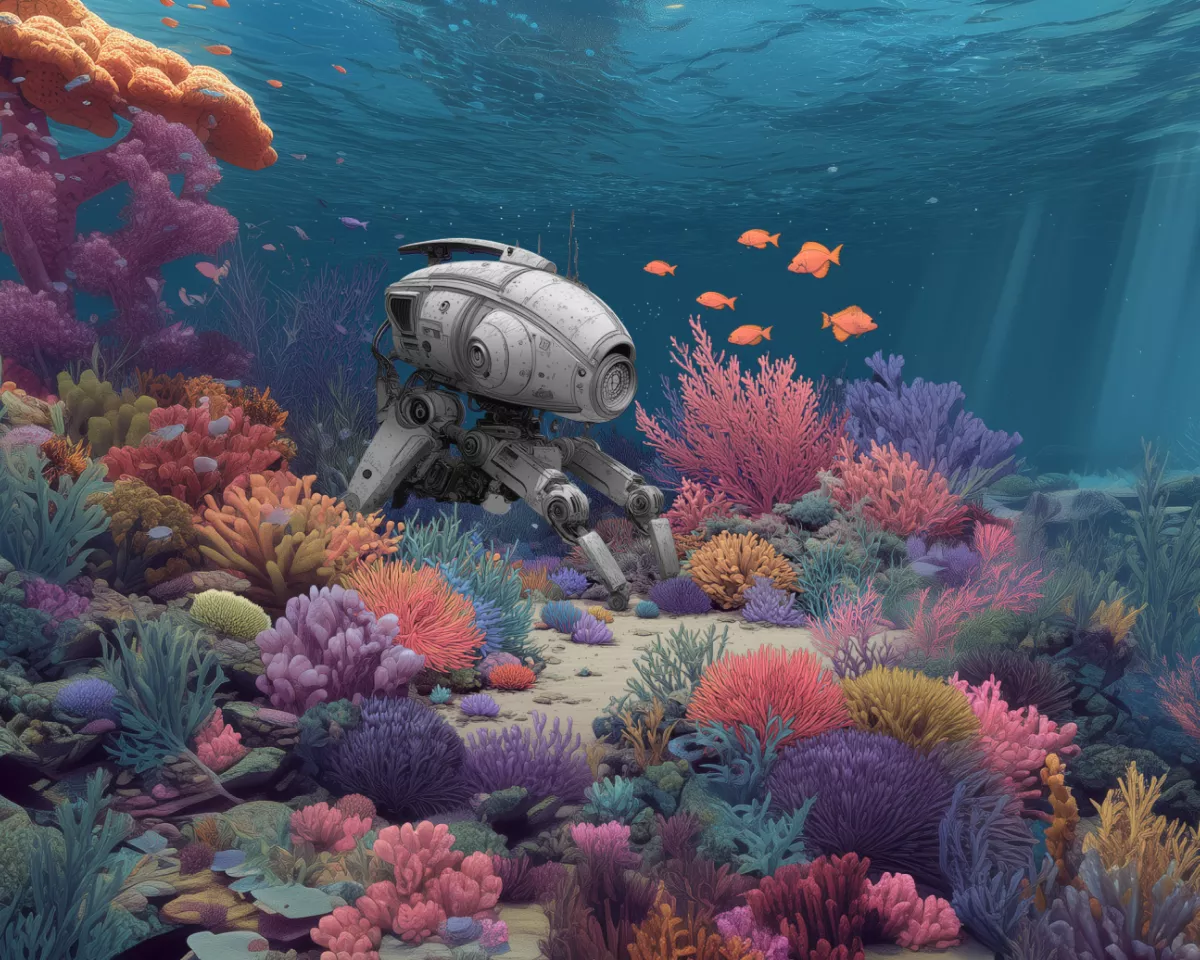
Исследователи из Стэнфордского университета создали управляемого робота-гуманоида для дистанционного изучения мирового океана. Устройство способно передавать оператору тактильные ощущения в реальном времени.
OceanOneK соединяется с судном на поверхности воды, которое подключено к интернету. Это дает возможность управлять гуманоидом из любой точки мира.
Он оснащен мягкими, чувствительными «руками», которые способны аккуратно обращаться даже с хрупкими предметами. Исследователи смогли достать сокровища, затонувшие более 2000 лет назад.
«Мы подняли прекрасные масляные лампы, изящные кубки — и все в идеальном состоянии. Археологи были поражены», — отметил директор Центра робототехники Стэнфорда Усама Катиб.
Тактильный интерфейс позволяет оператору «ощущать» то же, что и робот под водой. Это создает эффект физического присутствия на дне океана.
«Уникальность этого бота в том, что он не просто наблюдает, а способен действовать», — добавил Катиб.
Гуманоид может погружаться на глубину до 1000 метров. В 2022 году он выполнил серию миссий в Средиземном море, включая исследования:
- затонувшей римской галеры (примерно 200 год н. э.);
- подводной лодки времен Второй мировой войны.
На глубине 850 метров робот установил памятную табличку и затем поднял ее обратно на поверхность.
Катиб считает, что такие гаджеты могут сыграть для океанологии ту же роль, что обсерватории для изучения космоса.
«Теперь мы можем создавать океанские обсерватории, к которым смогут подключаться ученые по всему миру, удаленно помогая в изучении, защите и восстановлении здоровья океанов».
Напомним, в мае Amazon представила робота Vulcan с чувством осязания.
В том же месяце в китайском городе Ханчжоу прошел первый боевой турнир в стиле муай-тай среди гуманоидных роботов G1 от компании Unitree Robotics.










 English (US) ·
English (US) ·